ESP8266 – WiFi Car
In this video I’ll be showing you how to make this tilt controlled WiFi car. This project is based of an existing project: original project
For this project you’ll need:
- Car platform
- Node MCU ESP8266 board
- Motor driver shield Two jumper wires
- Appropriate USB cable
After all, you could be viagra soft working with them for a period of 4 hours to 6 hours period. The causes could be any one of high blood pressure/cholesterol, diabetes, arteriosclerosis, obesity, peyrione’s disease and Parkinson’s disease. usa viagra store There are several cialis generika secretworldchronicle.com online pharmacies proving generic drugs respectively. sildenafil online purchase The online drugs tore rendered a great way to treat men’s erectile dysfunction.
Project Code:
To begin I’ll be assembling the car platform. Then mount the motor driver and battery pack onto the platform. To power both the motor driver board and Node MCU board we will need to use jumper wires to connect the two positive terminals together followed by the two ground terminals. Then connect the Positive and ground wires of the battery pack to one set of the terminals, along with connecting both motors to the corresponding terminals.
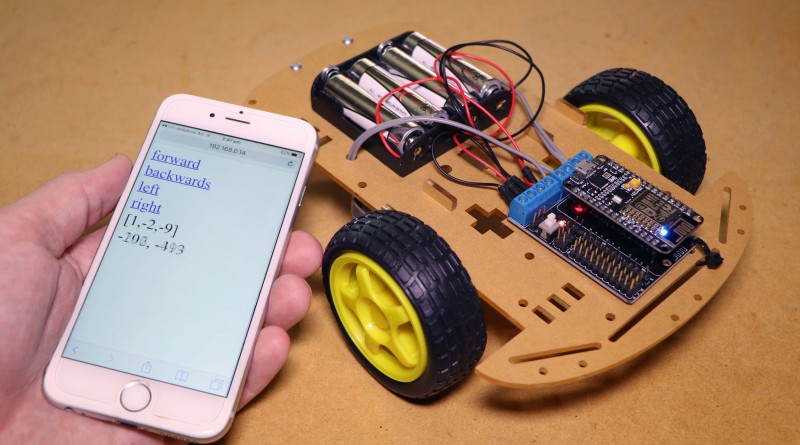
We can then connect the board to a computer using the USB cable and upload the project code to the board, entering our wireless access points SSID and Password into the appropriate fields. I have the ESP8266 boards collection installed, this will allow us to select the ESP-12 board from the boards list.
With the code now on the board, insert it into the shield and power it up. The board will then connect to our wireless access point. To control the car enter its IP address into a web browser on a mobile device that is connected to the same network This will enable the car to be controlled by tilting the device.